The Bathymetry of the Sea of Galilee:
An Inverse Interpolation Problem
The (direct) interpolation problem consists of using an interpolant
to find the values of a function at arbitrary points (irregular grid),
given the values of the function at equally spaced points (regular grid).
A more interesting problem is the inverse interpolation
problem: finding the values of the function on a regular grid
of points from which we can extract given values of the function at
irregularly-spaced points by interpolation.
We can pose the (2D) inverse linear interpolation problem as a
least squares problem, where the coefficient matrix
represents the 2D linear interpolant and the data vector
contains the function values at irregularly spaced points.
This problem is ill-conditioned. We introduce regularization
by imposing a constraint on the norm of the solution
(regularization with trust-regions).
We have used the LSTRS software to find
the bathymetry (depth distribution) of the
Sea of Galilee on a regular grid of points, given depth
measurements at irregularly spaced points. The regular grid was of size
201x201, yielding a constrained least squares problem of size 40401!
The data consists of triplets {x,y,z} representing coordinates on the
plane (x,y) and depth (z). The data was collected from a ship using
an echo sounder. Noise in the data comes from different sources, including:
malfunctioning equipment that reported zero depths at points in the middle of
the lake (!), and the fact that the measurements were taken at different
times of year and therefore, varied greatly from rainy season to dry
season. A detailed description of the data-acquisition process can be found in [1].
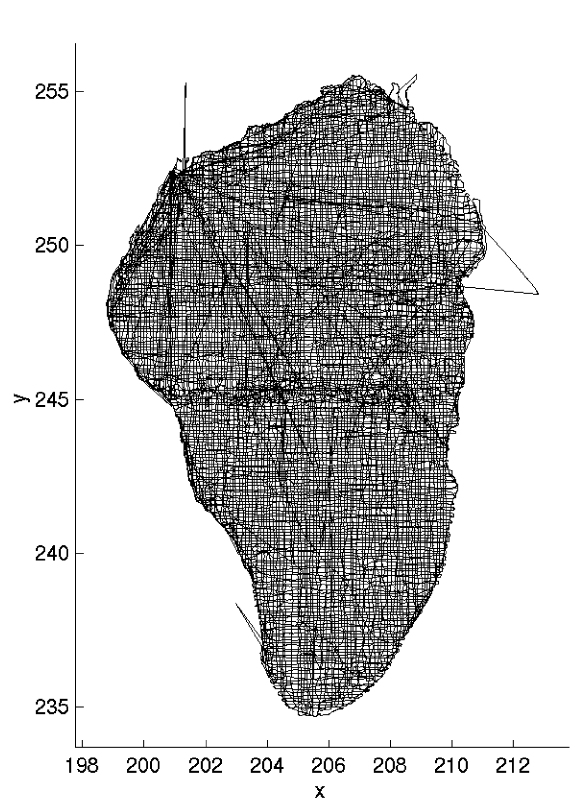
Figure 1. Original data.
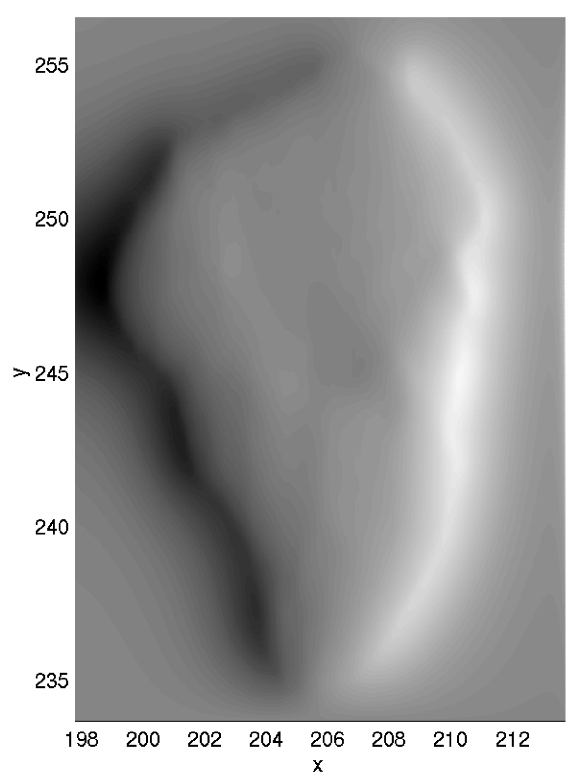
Figure 2. A regularized solution.
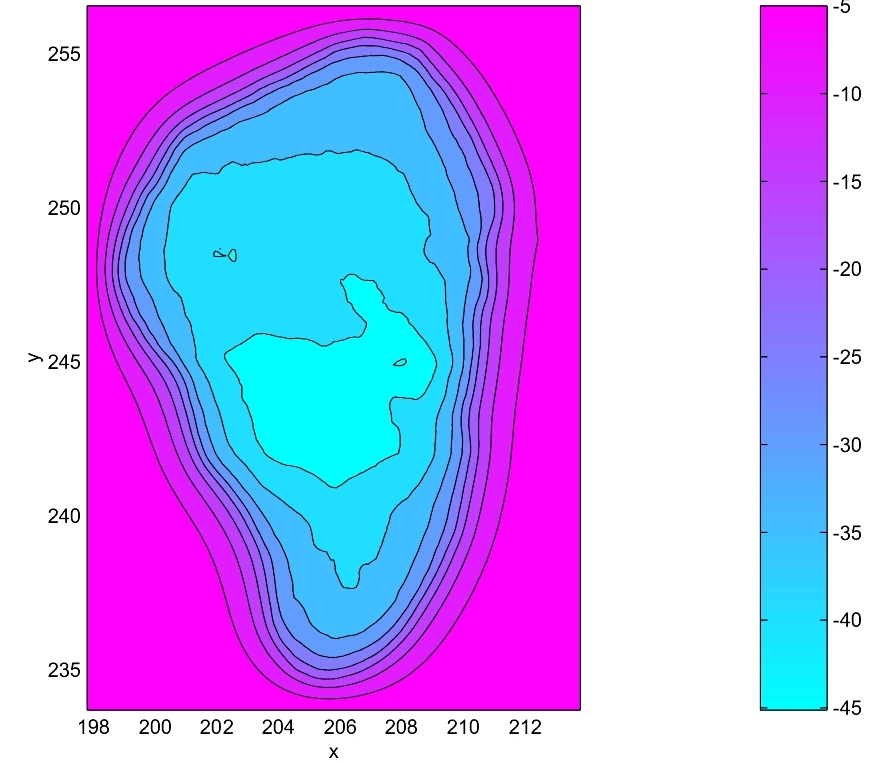
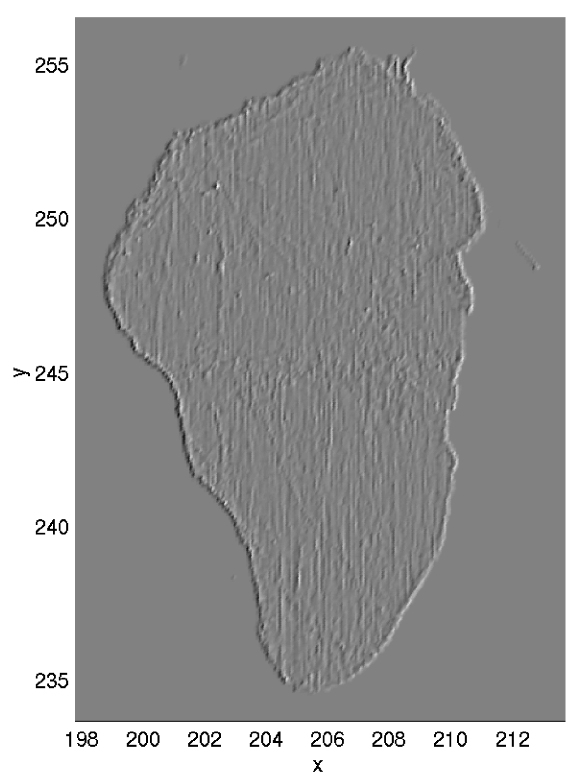
Figure 3. A good solution.
Figure 4. Good solution, contour plots.
(Click on images for high-resolution versions.)
In Figure 1, we show a view from above of a 3-D plot of the original data.
The straight lines we observe in the figure are the tracks of the ship, which
were recorded as lake-bottom information.
Therefore, the data-acquisition process was an additional source of noise.
Those lines should not be present on an image of the lake.
The computed map in Figure 2 still shows the lines. Figure 3 is a better
solution whose contour plots (in Figure 4) allow us to identify known
features of the lake such as some ancient shores that are now submerged
on the Southwest, and some shelves on the Northeast.
More details can be found in [2,3].
References
[1] Z. Ben-Avraham, G. Amit, A. Golan and Z.B. Begin.
The bathymetry of Lake Kinneret and its structural significance,
Israel Journal of Earth Science, 39:77-84, 1992.